Cloud Intelligence™
いいとこ取り:GKE StandardクラスタでAutopilotモードのワークロードを実行する
このページはEnglish、Deutsch、Español、Français、Italiano、Portuguêsでもご覧いただけます。









About Chimbu Chinnadurai
I've probably debugged a Kubernetes issue in more time zones than I care to count. Based in London, I help engineering teams across EMEA get their clusters to behave — and actually understand why they misbehaved in the first place.
I write, speak, and guest on podcasts about all things cloud-native. Away from the terminal: I enjoy cooking almost as much as simplifying overly complex systems.
My personal pageクラウドインフラでは、柔軟性・制御性・運用負荷のバランスをどう取るかが常に課題です。Kubernetesを採用する多くの組織は、ノードやネットワーク、ストレージなどをきめ細かく制御したい一方で、その管理・保守の負担に頭を悩ませています。
Google Kubernetes Engine(GKE)は、この課題に対して2つのモードを用意しています。
- Standardモード: ノードプール、アップグレードのスケジュール、OSイメージなどを自分で管理できます。
- Autopilotモード: オートスケーリング、アップグレード、セキュリティ設定など、インフラの大部分をGoogleが管理します。
では、同じクラスタ内で、あるワークロードにはStandardモードのきめ細かな制御を、別のワークロードにはAutopilotモードの手離れの良さを使い分けたい場合はどうすればよいでしょうか。
GKEは現在、StandardクラスタにおけるAutopilot ComputeClassesによってこのハイブリッドモデルをサポートしており、Standardクラスタの中でAutopilot管理のワークロードを実行できます。
PerfectScale™ for Kubernetes
Ready to optimize?
Get your free Kubernetes savings analysis
StandardクラスタとAutopilotクラスタの課題
Standardのみ、あるいはAutopilotのみで運用する組織がぶつかりがちな課題と、なぜどちらか一方では不十分なのかを整理します。
- Standardクラスタの運用負荷: 完全な制御権を握れる一方で、スケーリング、メンテナンス、セキュリティの責任もすべて自分たちで担うことになります。小規模なチームには重荷になりがちです。
- Autopilotクラスタの柔軟性の制約: マネージド運用の恩恵が得られる反面、最小リソースリクエスト、特定のOSイメージ、ノード構成の制限など、さまざまな制約も伴います。
- コストと請求の問題: Standardクラスタでは、ワークロードが利用可能なリソースを使い切っているかどうかにかかわらず、ノードプールを構成する仮想マシン(VM)の料金が発生します。管理を怠ると、過剰プロビジョニングによるムダなコストにつながりかねません。
こうした事情から、多くの組織はStandardモード(柔軟だがメンテナンス負荷が大きい)とAutopilotモード(運用は楽だが制御性に欠け制約が多い)のいずれかを選ばざるを得ませんでした。ワークロードが混在する現場では、どちらも決め手に欠けるケースが少なくありません。
Your cloud bill shouldn't be a mystery
Optimization, automation, expertise. In one platform.
解決策:StandardクラスタでAutopilot ComputeClassesを使う
GKEの「Autopilot ComputeClasses in Standard Clusters」は、ComputeClasses(マシンタイプや機能設定など、ノード構成のリストを定義するKubernetesのカスタムリソース)を活用してハイブリッドモデルを実現する仕組みです。柔軟性が一段引き上がり、いくつもの大きなメリットが得られます。
StandardでのAutopilotモードは、低レイテンシと高パフォーマンスを追求して設計された、新しいコンテナ最適化コンピュートプラットフォームを基盤としています。これにより、Podのスケジューリングが最大7倍高速化され、Autopilot ComputeClassesを利用するワークロードのアプリケーション応答時間が大きく改善されます。
主なメリットは次のとおりです。
- 特定のワークロードを、Googleが完全管理するAutopilotモードで実行できます。
- 手動で作成したノードプールなど、Autopilotモードを使わないワークロードやインフラについては、これまでどおり手動で制御できます。
- Autopilot ComputeClassをクラスタや名前空間のデフォルトに設定すれば、明示的な指定がない限り、ワークロードが自動的にAutopilotの恩恵を受けられます。
要件と制限事項
魅力を感じたら、StandardクラスタでAutopilotワークロードを有効化する前に要件と制限事項を必ず確認してください。
- Autopilotノードには厳格な機能・セキュリティ要件が課されます。Standardのワークロードがこれらの要件を満たさない場合は拒否されることがあるため、ノード設定を確認して互換性を担保してください。
- クラスタはRapidリリースチャンネルに登録されており、バージョン1.33.1-gke.1107000以降である必要があります。
- Rapidリリースは新機能や新しいKubernetesバージョンをいち早く取り込めますが、破壊的変更が含まれることもあります。クラスタをアップグレードする前に、APIなどの変更点を確認して必要に応じて対応してください。
- 標準のシステムPodを実行できるよう、クラスタ内にnode taintのないノードプールが少なくとも1つ必要です。
- クラスタはVPCネイティブで、Shielded GKE Nodesがデフォルトで有効になっている必要があります。
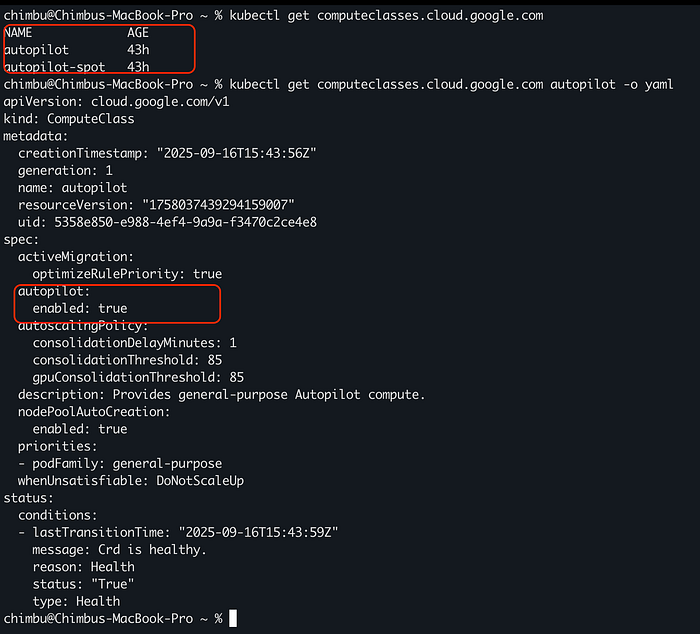
ビルトインのAutopilot ComputeClasses
クラスタを対応バージョンにアップグレードすると、GKEがautopilotとautopilot-spotのComputeClassesカスタムリソースを自動的に構成します。
Autopilot ComputeClassesのサンプル
ワークロードでAutopilot ComputeClassを指定するには、cloud.google.com/compute-classラベルを対象としたノードセレクタを使います。
#Sample workload that uses built-in autopilot ComputeClass
---
apiVersion: apps/v1
kind: Deployment
metadata:
name: helloweb
labels:
app: hello
spec:
selector:
matchLabels:
app: hello
template:
metadata:
labels:
app: hello
spec:
nodeSelector:
# Replace COMPUTE_CLASS with the name of the compute class to use.
cloud.google.com/compute-class: COMPUTE_CLASS
containers:
- name: hello-app
image: us-docker.pkg.dev/google-samples/containers/gke/hello-app:1.0
ports:
- containerPort: 8080
resources:
requests:
cpu: "250m"
memory: "4Gi"

コンテナのリソースはAutopilotの要件に合わせて自動的に調整され、コンテナ最適化コンピュートプラットフォームのノード上にスケジュールされます。
カスタムComputeClasses
ビルトインのComputeClassesで要件を満たせない場合は、特定のワークロード向けにカスタムAutopilot ComputeClassesを作成できます。GPUや特定のマシンファミリーを必要とするワークロードでは特に有効です。
すでにカスタムComputeClassを使用している場合、既存のComputeClassリソースをAutopilotモードに切り替えるには、更新後の仕様で再作成する必要があります。詳細は既存のカスタムComputeClassでAutopilotを有効にするを参照してください。
#sample custom ComputeClass with autopilot mode enabled
---
apiVersion: cloud.google.com/v1
kind: ComputeClass
metadata:
name: autopilot-n2-class
spec:
autopilot:
enabled: true
priorities:
- machineFamily: n2
spot: true
minCores: 64
- machineFamily: n2
spot: true
- machineFamily: n2
spot: false
activeMigration:
optimizeRulePriority: true
whenUnsatisfiable: DoNotScaleUp
独自のComputeClassesでは
podFamily優先度ルールは利用できません。このルールはビルトインのAutopilot ComputeClassesでのみ使用可能です。
Autopilotモードを有効化したカスタムComputeClassesは、GKEクラスタ単位または名前空間単位でデフォルトのコンピュートクラスとして設定できます。設定したデフォルトクラスは、そのクラスタまたは名前空間内で別のコンピュートクラスを指定していないすべてのPodに適用されます。コンピュートクラスを指定せずにPodをデプロイすると、GKEは次の順序でデフォルトのコンピュートクラスを適用します。
- 名前空間にデフォルトのコンピュートクラスが設定されていれば、GKEはそのコンピュートクラスを選択するようPodの仕様を書き換えます。
- 設定されていない場合、クラスタのデフォルト設定があればそれが適用され、GKEはPodを変更しません。
詳細はこちらのリンクを参照してください。
StandardクラスタでAutopilotモードのワークロードを実行できるようになったことで、組織は両者のいいとこ取りが可能になります。一部のワークロードでは管理負荷を抑えつつ、必要な箇所では柔軟性と制御性をしっかり確保できるのです。
PoCの検討やデプロイの計画を進めている方は、ぜひDoiTにご相談ください。100名を超える専門家チームが、お客様に合わせたクラウドソリューションをご提案し、コンプライアンスや今後の需要を見据えたインフラ最適化を伴走支援します。
ポリシー適用フェーズを迎える今、貴社にとって最適な進め方をご一緒に検討しませんか。堅牢でコンプライアンスに準拠し、成果につながるクラウドインフラの実現をお手伝いします。今すぐお問い合わせください。